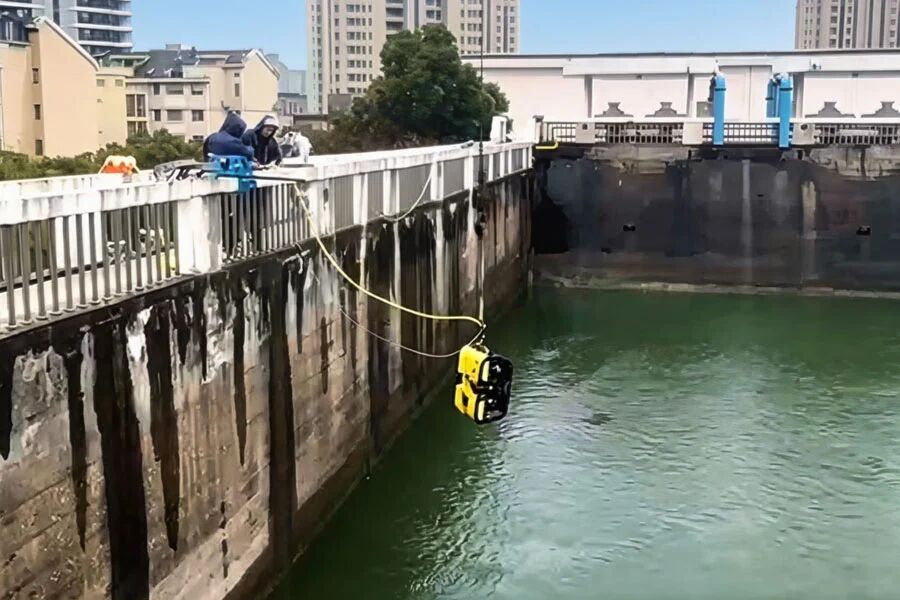
现场布放水下机器人
本次检测范围全长约2公里,渠道内部结构复杂,存在多个倒虹吸结构及转弯节点,空间条件受限,通行难度较高。同时,水体能见度不足0.3米,检测环境接近“盲检”状态。在如此条件下开展长距离连续作业,并对关键结构节点逐一确认,对水下机器人的稳定控制能力、持续作业能力以及风险应对能力均提出了严格要求。

本次任务使用的江豚Ⅳ-C Pro水下机器人

作业现场
面对复杂环境与高标准任务要求,深之蓝采用水下机器人系统执行检测工作。在人工无法进入的密闭空间内,水下机器人完成了渠道内壁结构巡检、管节接缝排查、关键节点确认以及复杂坡段与转弯结构的安全通过。长距离拖缆作业、低能见度环境控制、倒虹吸坡段姿态调整等问题叠加,对整体组织能力和技术稳定性形成了综合考验。项目团队通过精细化组织与全过程技术保障,逐段推进、逐点确认,确保检测覆盖完整、数据记录准确、风险可控。

水下机器人入水后开始作业
随着全部检测任务顺利完成,项目形成了完整的影像与结构评估成果,为后续运行维护与安全评估提供了基础数据支持。这不仅是一项检测任务的完成,更是一次对城市供水基础设施安全状况的系统性核查。

视频检测画面
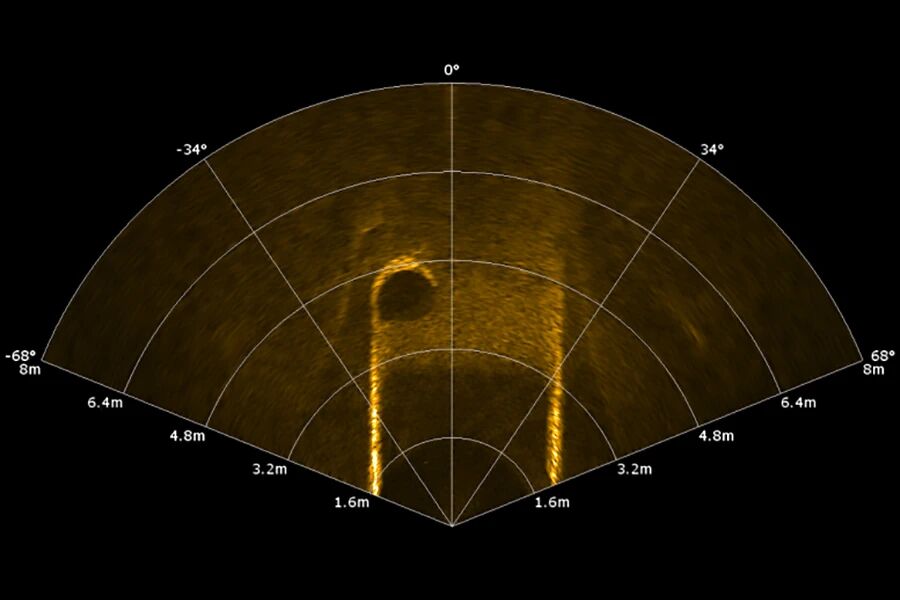
声学检测画面
城市运行的安全与稳定,往往建立在这些不被看见的工程之上。原水渠道深藏水下,却承载着城市运转的基本保障。深之蓝将持续深耕复杂水下环境检测领域,以更高标准服务水利与市政基础设施建设与运维,为城市生命线工程安全运行提供长期支撑。