本文作者为天津市和平区生态环境局检测人员与深之蓝技术团队
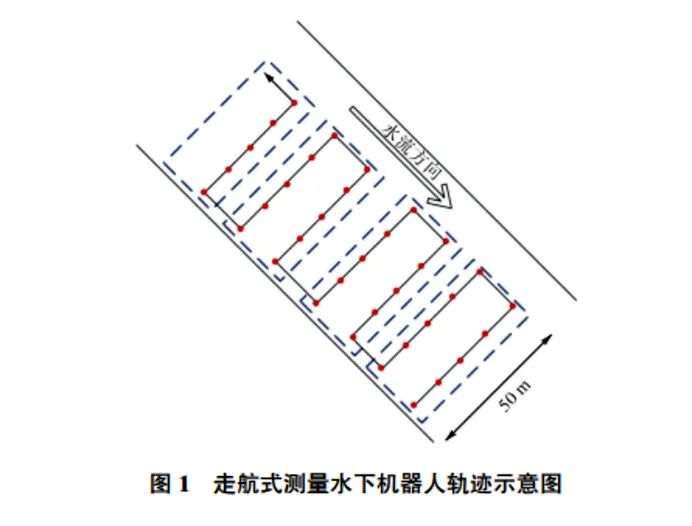
摘要:据悉某区域内河流地表水监测结果显示存在一定程度上的水质异常,为确认异常的原因,采用有缆遥控水下机器人作为水下平台搭载多参数水质传感器和走航式调查监测方法对该区域河道水质进行整体分析研究;此外,辅助搭载声学载荷(扫描声呐)和光学载荷(水下高清摄像头),采用定点式调查监测方法对该区域多个排水口内外水质和扫描声呐图像进行分析研究。分析结果表明该区域河道段未发现不明排水口和相对显著异常的污染源,但其中部分排水口可能存在雨污混流的现象,由此导致监测数据产生差异。
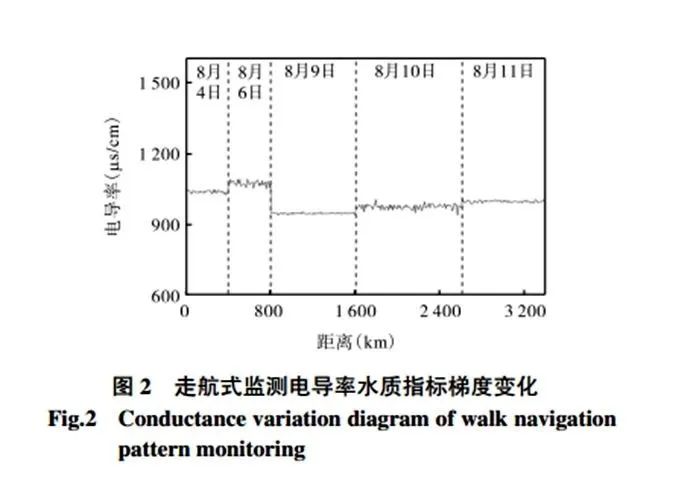
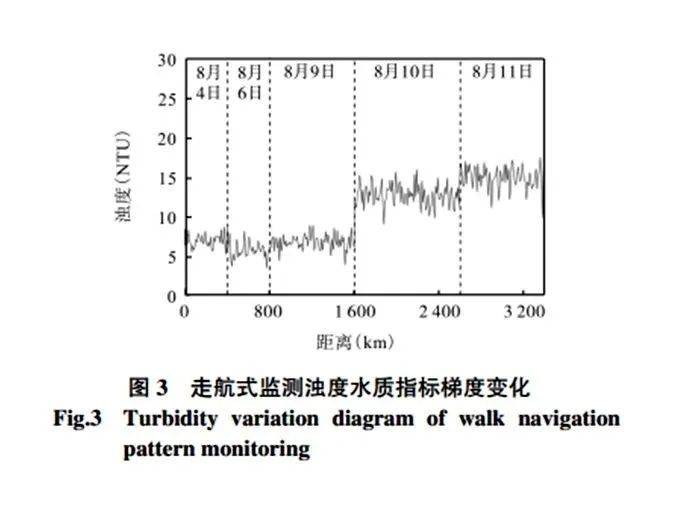
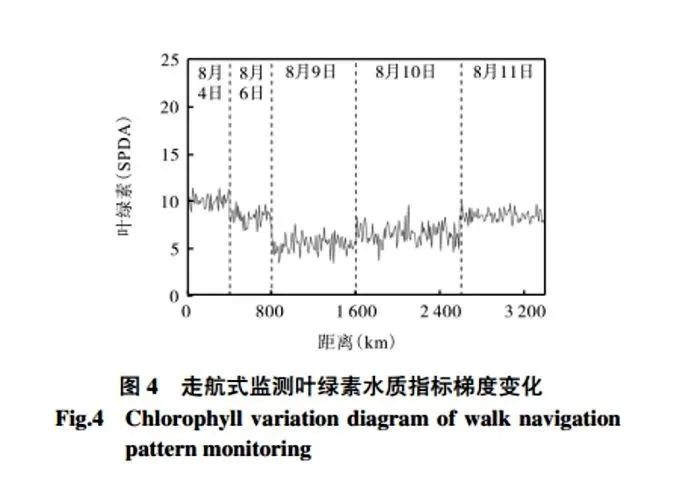
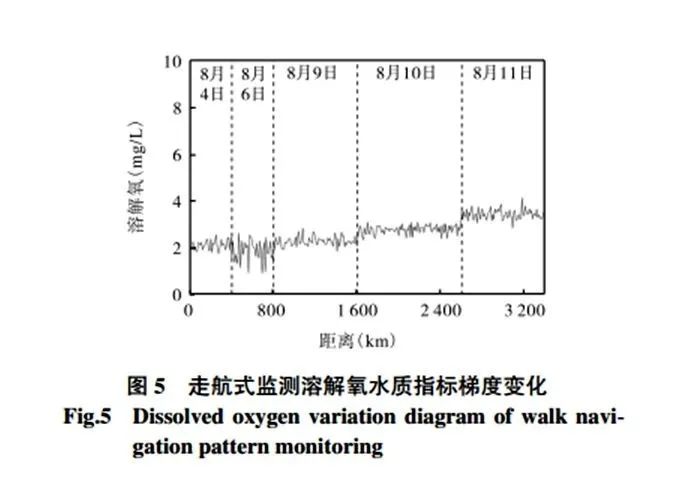
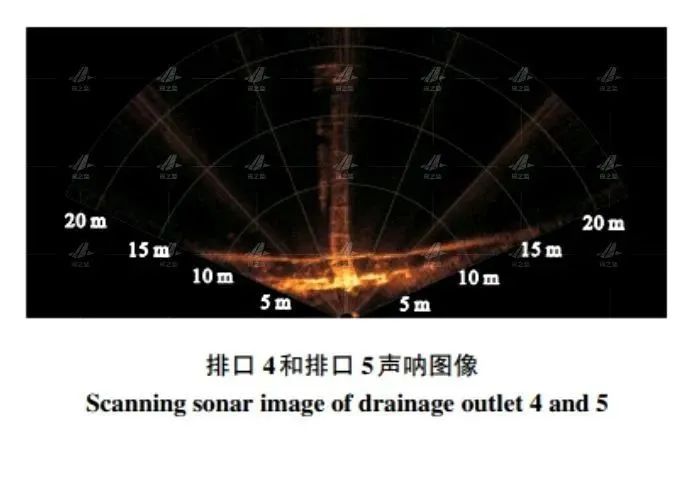
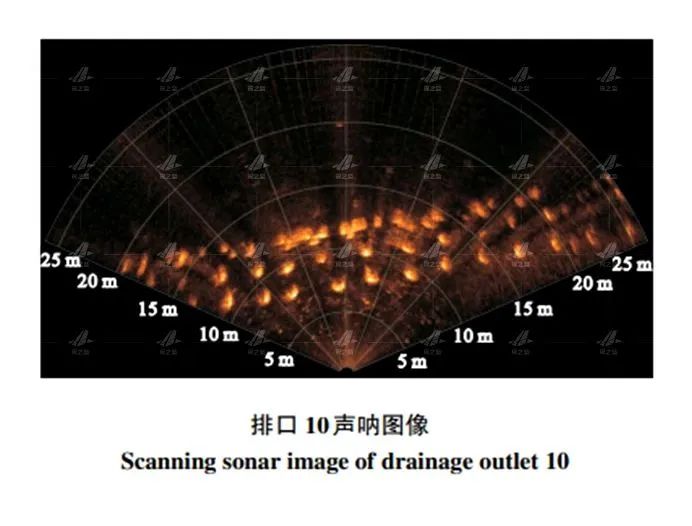
结论 ①采用走航式水质监测调查时,未发现存在不明 排口或异常污染源的证据;②采用定点式水质监测调查时,排口 4 和排口 5(共用一个排口)可能存在雨污混流的情况,其他位 置未处于排水期,暂时无法进行具体分析;③为保障该河道地表水水质和维护良好的生态环境,建议对河道实施连续记录、动态监测,以实现持续性预防水资源污染的目标。