










水库大坝长年挡水运行、水工建筑物的自然老化和受地震等地质灾害的影响,已有水利工程的运行与维护及新建工程的施工,都需要进行相应的水下检查,以掌握工程水下结构和设施的运行状况,如水下结构损坏、缺失、裂缝、老化,以及不稳定体、冲刷冲坑、地形地貌、金属设备腐蚀等。对水利工程定期开展检测是非常必要的。
对于水库大坝水下部分的检测早期主要通过放空检测或蛙人检测,但是放空检测经济成本大,有时会给周边环境带来一定危害,有的高坝根本不具备放空条件;蛙人检测安全隐患大,且蛙人下潜深度不宜超过50m, 作业时间短,无法满足长时间大面积或深水检测任务,工程检测要求潜水员同时具备专业的知识或经验,对人员要求比较高。在这种情况下,20世纪50年代开始,水下机器人在水利行业因为以下优点而越来越受到欢迎。
水下机器人检测优势
深之蓝团队走访水利水电行业客户数十家,在客户端服务过程中积累了丰富的经验和案例,通过水下机器人搭载个性化的检测工具,结合深之蓝在水下图像处理、多介质通讯技术、智能识别等方面的优势,多次帮助水利水电客户完成日常巡视检查、年度巡视检查以及特殊情况下的巡视检查工作。

光学成像检测
光学成像设备是ROV的基本配置之一,包括彩色摄像机、黑白摄像机等,因为成像效果受光源和水体质量影响较大,通常配备LED 光源。下为深之蓝水下机器人搭载光学成像系统检测的一些实际案例。
.png")
毫米级裂缝 塌陷
.png")
坝体冲刷的落石 杂物积堵的泄洪栅
声学成像系统
水质条件较差的情况下,水下机器人可通过搭载声学传感器,利用声波在物体表面或内部结构反射的原理获得目标物的二维或三维成像。从而发现水库大坝水下结构的病害隐患。下为深之蓝水下机器人结合声呐在客户现场的一些测试案例。
.png")
声呐检测某大坝漏洞 某水电站闸门实测图
.png")
声呐测得某风电桩基冲刷坑面积为30m2
.png")
3D 声呐绘制某隧洞结构
激光标尺检验
水下机器人搭载激光尺度仪。绝对间距平行光束射向水工建筑面,以便确定坝体缺陷、裂缝的尺寸,配合深之蓝自主研发的智能识别与数据处理软件,可直接输出坝体缺陷尺寸。
.png")
深之蓝激光标尺 “河豚”搭载激光标尺
喷墨示踪装置检测
水下渗漏位置较为隐蔽时,可采用水下机器人搭载喷墨示踪装置,在可能渗漏通道入口处释放示踪剂,利用高清摄像实时记录流场中示踪剂的运动状态,直观判断渗漏通道入口。下为深之蓝水下机器人搭载喷墨示踪装置检测某大坝漏点。
.png")
“河豚” 工作现场 高清影像记录示踪剂从渗点漏出
连通性试验验证技术通过水下机器人在上游库底投入示踪剂,利用渗漏入口的水流吸附力将示踪剂吸带入通道。根据下游示踪剂出露位置、高程查明渗漏通道大致分布,利用出露时间确定渗漏流速的量级并验证渗漏通道。

深之蓝水下机器人完成连通性试验示意图
.png")
深之蓝“河豚” 搭载喷墨示踪装置进行连通性试验
.png")
深之蓝客户现场连通性实验下游示踪剂出
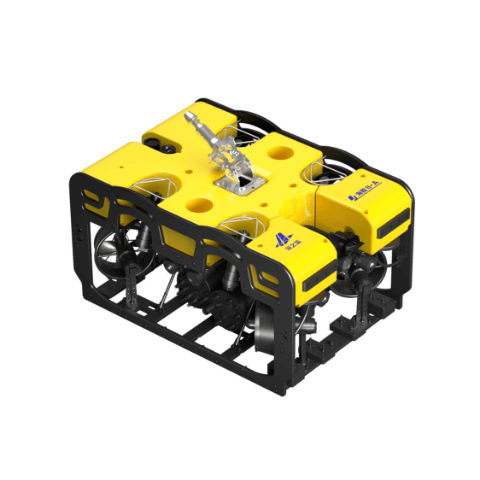
深之蓝推荐—水电专用水下机器人
水电专用标准款——“河豚”Ⅳ-A
.png")
✅重量轻,无吊机可部署
✅低供电,适应山区条件
✅智能控制,快速稳定
✅标配水电检测专属附件
黑白摄像机
检测声呐
激光尺度仪
喷墨示踪装置
面板坝专用款——爬行机器人
.png")
✅超高的抓地力
面板堆石坝水下结构复杂,增加贴壁爬坡实用性能,可在高达38°的坡道上爬行
✅双模式灵活切换
整套水中为微负浮力状态,结合避障声呐,爬行/浮游模式灵活切换
✅稳定观察
低重心结构,阻尼减震,贴面观察更稳定
长隧洞检测专用水下机器人
.png")
✅360°全景摄像系统
✅恒张力自动收放缆轴
✅一体化转运车
✅全自动驾驶
✅长隧洞专用导航系统
✅清洗附件
针对水利水电行业客户需求,更多水下机器人产品将出现,以期让水库大坝检测过程更高效、结果更可靠。扫描以下二维码,获得深之蓝水利水电行业产品方案视频,在水利水电行业工作的您希望水下机器人能够解决哪些问题?欢迎与我们联系讨论。
.png")
参考文献
[1]谭界雄, 田金章, 王秘学.《水下机器人技术现状及在水利行业的应用前景》,《中国水利》, 2018-12-019
[2]郑发顺,《遥控水下机器人系统在水库大坝水下检查中的应用》,《水利信息化》2014年第02期
[3]李璐,《水下机器人在病险水利工程检测中的应用》,《湖南水利水电》,2015-05-016
[4]王祥,宋子龙,《ROV 水下探测系统在水利工程中的应用初探》,《人民长江》,2016年第2期101-105



