










我国的水域资源丰富且广阔,然而,水域事故也时有发生。随着国家对水域安全管理的日益重视,水域事故的应急救援工作显得尤为关键。在这一背景下,水下搜寻技术显得尤为重要,而ROV(缆控水下机器人)则以其独特的优势成为了应急救援的首选工具。
复杂水域环境为搜寻工作带来了诸多挑战。其中,水流、水下地形等多种条件都是需要考虑的重要因素。特别是在面对水下洞穴、复杂地形等区域时,救援工作的难度更是成倍增加。这些区域往往暗流涌动、地形崎岖,给ROV的操控和作业带来了极大的考验。为确保ROV能够胜任这类任务,它必须具备一系列专业的技术能力。
1. 出色的机动性和灵活性
在面对暗流密布、地形狭窄复杂的水域时,ROV的抗流能力、机动性和灵活性将受到极大的考验。
深之蓝的ROV产品合理布局多台自研的高推重比推进器,并使用推力分配算法,根据ROV的运动自由度和作业需求,合理分配各个推进器的推力,确保了ROV的机动性和灵活性,实现了ROV在水下的全姿态运动,为救援工作提供了强有力的支持。

2. 高精度导航和定位能力
由于水下环境信号易受遮挡和干扰,ROV难以准确确定自身位置和事故位置。
深之蓝的ROV使用声纳设备来感知周围的水下环境,结合深度等传感器,确定ROV的位置、姿态和速度。这些传感器和技术为ROV提供了基本的导航和定位信息。同时使用超短基线(USBL)系统进一步提高导航精度,通过在水下布置一系列声呐信标或接收器,利用声波的传播和反射原理,精确计算ROV与信标之间的相对位置,从而实现高精度的定位和导航,为后续的救援工作提供帮助。

3. 水下环境的精准感知
在水下洞穴或深度较大的区域,光照条件差,部分水域较为浑浊,难以勘察水下情况,对于搜寻工作是一项巨大的考验。
深之蓝ROV配备一系列先进的感知设备和技术。配有高清摄像头能够提供清晰的水下图像,为了应对水下光照不足或浑浊的情况,会使用高感光度摄像仪与高亮的照明灯组配合,优化成像效果。同时配备有声呐系统,通过处理声呐信息,ROV可以获取水下地形、障碍物和目标的信息,实现精确的探测和定位。

4. 便携、易于布放
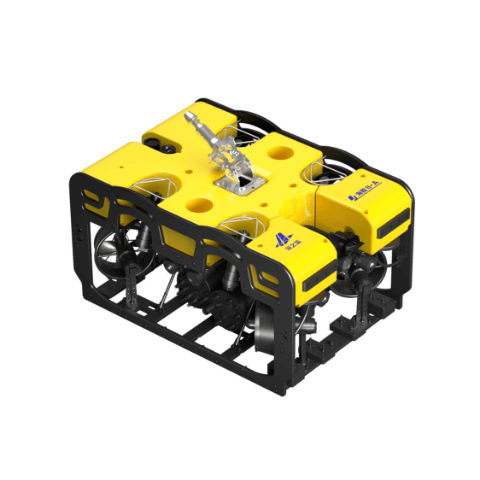
在事故发生时,往往需要快速响应并携带设备进行工作。深之蓝的Performer系列ROV采用极致轻量化的设计布局,使得整套设备小巧便携,仅需1-2人即可完成搬运和布放工作。这一特点使得ROV能够在第一时间参与救援,为救援工作赢得了宝贵的时间。

5. 专业的应急救援团队
在面对水下洞穴和复杂地形时,救援工作的难度更是成倍增加。复杂的水下地形导致ROV操作难度的上升,在这样的环境下,ROV的使用经验变得尤为重要。
深之蓝拥有由中国潜水救捞行业协会授予的中国首支水下智能救援队,具备完善的应急响应机制和协调能力,能够在第一时间赶到事故现场,展开紧急救援行动。救援队中有多名金牌ROV操作手,操作手经过严格的选拔和培训,拥有丰富的ROV操作经验和精湛的操作技术水平,能够迅速分析各种复杂的水下环境,准确判断并应对各种突发情况,确保救援任务的顺利完成。

深之蓝“双机协同作业”完成广西九顿天窗潜水事故救援打捞任务
2023年10月深之蓝在收到潜水员失联的消息后,深之蓝迅速组织紧急救援小队前往现场。通过布放ROV对地形进行详细勘察和人员搜寻,深之蓝的ROV成功找到了失联潜水员的位置。面对号称“水下珠穆朗玛峰”的九顿天窗复杂地形,深之蓝采用了双机协同作业的方式,成功完成了打捞任务。在本次救援打捞任务中,深之蓝ROV充分展示了其在复杂水域环境下的卓越搜救能力和产品实力。

南宁圣龙潭水下226米搜索打捞任务
2021年9月,深之蓝受邀参与南宁圣龙潭失联潜水员搜索打捞工作。操作手操作水下机器人陆续排查了水下东向80米平台、西向130米平台、南北向150米平台及200米平台,最终在深度226.5米处确认遇难者位置。并通过机械臂夹取将遇难者打捞上岸,至此搜救工作顺利完成。
深之蓝完成国内首起大深度(226 米)全过程(无潜水员下水)水下机器人搜索打捞任务。

重庆万州公交车坠江事件搜救
2018 年10月,重庆市万州区长江二桥发生重大交通事故,该处长江水深70 米左右,水下情况复杂,搜索有一定困难,救援难度大。最终深之蓝与长江航道局、福山蓝天救援队三方协同合作,通过水下机器人定位车辆位置,并进入大巴车内,拍摄到清晰的水下画面。极大地协助了打捞工作。

深之蓝的ROV产品凭借其出色的机动性和灵活性、高精度导航和定位能力、出色的感知能力以及易于布放的特点,成功克服了复杂水域环境下的搜寻技术难点。在未来的水域应急救援工作中,深之蓝将继续发挥重要作用,为保障水域安全做出更大的贡献。



