










海上风电将是未来风力发电领域的重点发展方向,近年来我国海上风电得到了快速的发展,到2022年底,我国海上风电累计并网装机达到3046万千瓦,持续保持海上风电装机容量全球第一。海上风电场的水下资产通常包括风电机组、海上升压站的桩基础结构和海底电缆。
根据调查机构统计,国外海上风电后期运维过程中,海缆和桩基等水下资产占据了海上风电总体保险赔付金额的92.7%和数量的55.6%。我国海上风电起步较晚,海上风电场的投运时间普遍较短,但也出现了多起由于桩基础和海缆故障导致的风电机组以及风电场长期不能正常发电,发电企业承受了巨大的经济损失。因此,定期开展水下检测,掌握水下资产健康状态,对避免发横故障或降低损失具有重要的意义。
目前海上风电水下常规检测方法包括由潜水员携带水下摄像机或其它检测设备进行水下作业,船舶搭载多波束成像声呐、测扫声呐或电磁检测设备进行检测作业。近年来,随着水下机器人在海洋科学研究、海洋工程及战略高技术等领域得到了广泛应用。在海上风电领域,有缆遥控水下机器人依靠脐带电缆提供动力,水下作业时间长、数据实时,作业能力较强,能够针对检测作业类型搭载各类传感、测量和检测系统,具备执行海上风电水下检测的能力,得到了广泛关注。
一、水下机器人简介及应用现状
水下机器人的研究始于1953年,最初用于军事方面的需求,由美国、俄罗斯、日本和法国等国率先研制,同时结合了计算机技术、声呐技术、水下微光电视、遥控技术和定位导航等技术。后来,海洋石油工业的迅速发展带动了工业型水下机器人的发展,北海油田和墨西哥湾油田在1975年使用了第1台商业化水下机器人,至今各种类型、各种功能的水下机器人(ROV)数量已数不胜数,有超过400家厂商提供水下机器人生产销售与技术服务。
水下机器人从与母船之间有无电缆可分为有缆遥控ROV,无缆自治水下机器人(AUV)。按使用目的可以分为观察级水下机器人与作业级水下机器人。观察级水下机器人通常仅搭载图像采集设备,不携带作业设备,结构上ROV和AUV都有;而作业级水下机器人除了搭载图像采集设备之外,还需要携带作业设备(例如机械臂、机械手等),结构以ROV为主。总体来说,ROV系统可分为水上控制部分、脐带缆和水下作业部分。水上部分一般包括电动绞车、控制箱(电源箱、工控机、显示器等)和手持控制器等。
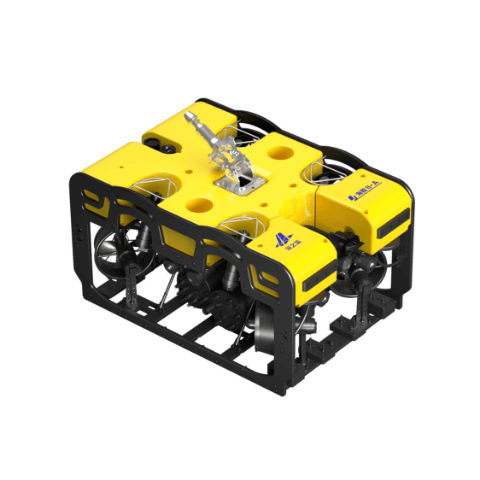
脐带缆一般均为零浮力凯夫拉脐带缆,通过内部的线缆实现供电、数据传输和控制。ROV水下作业部分的载体结构采用开架式结构,由主体框架、浮体材料、动力系统(推进器)、传感和控制系统(水下电子仓)以及供电和通讯线缆等部分构成,这样将ROV内部空间预留给水下定位系统和各类检测系统,便于设备的安装和保护,最大限度优化ROV的空间结构布局,同时也能保证ROV具有良好的外部扩展性,能够搭载各类传感系统、检测系统和机械手作业系统。如图1所示,随着科技的不断进步,ROV整体的发展趋势向着深海、重型化和多功能作业,一方面下潜深度不断增加,另一方面通过搭载多个机械手开展水下调查和作业。
在海洋石油工程领域,ROV在水下导管架和海底管线施工及运维作业中得到了广泛应用,主要包括地貌调查、导管架定位、引导插桩、监控打桩、辅助作业、导管架调查、海底管线属下观测、电位测量、管线悬跨测量、水下作业等工作。

在电力领域,ROV在水电站大坝检测、核电站水池作业以及海上风电水下检测领域均有一定程度的应用。在欧洲、美国等海上风电场,通常由专业的服务公司运用ROV提供海底工程和相关的检测服务工作。2022年,法国电力集团(EDF)和海上机器人资产认证中心(ORCA)联合使用ROV首次实现了风电场水下基础的自主检测。由于国外海上风电场普遍水深较深,海洋水质环境好,深水环境下水流较为稳定,和海上石油平台环境类似,通常借鉴和沿用海洋石油工程的ROV和检测作业内容,使用的ROV重量也普遍在500kg以上,主要的生产厂商包括SharkMarine、Fugro和Oceaneering等。
在国内海上风电领域,近年来也逐渐开始尝试使用ROV携带光学或声呐设备对水下结构进行观察。但由于我国海上风电项目还基本处于近海,存在着水深较浅、海水较为浑浊、水下地形复杂、流速快、障碍物多等不利因素,使用小型ROV抗流能力差、检测手段单一,作业受到海况严重制约,作业效率差。使用海油工程中的作业型ROV又存在体积重量大、设计环境和近海实际作业环境不匹配、对母船要求高、设备昂贵且维护不便等问题。
二、海上风电场水下检测需求分析
我国海上风电起步较晚,尽管近年来发展迅猛,但整体技术水平特别是水下领域和国外还有一定差距,我国海域特点又与国外具有较大差别,同时“抢装潮”也在一定程度上影响了工程质量,基建过程中水下隐蔽工程施工缺乏有效监测,导致在投运后出现了较多问题。
⒈桩基础结构检测需求
桩基础结构常见问题包括水下钢结构及附件损伤、变形以及海生物的附着,牺牲阳极海生物附着、过量消耗和保护效果下降,以及基础冲刷严重导致机组振动超标和长时间停机等。针对上述问题,检测作业需求主要包括:
⑴外观检查:检查钢结构、套笼外表面完整性,是否存在凹陷等明显形变、腐蚀、防腐涂层损伤和构件缺失;检查外表面海生物附着情况,包括覆盖率、厚度和类型。
⑵牺牲阳极检查:牺牲阳极结构是否完整,是否有破碎、脱落以及固定支架是否完好,牺牲阳极表面海生物附着情况,以及腐蚀范围、白色覆盖程度。牺牲阳极尺寸,如耗蚀超过2/3,应进行更换。
⑶基础冲刷检测:检查水下结构基础的冲刷淤积情况、结构附近的掉落或沉淀物情况;测量冲刷或堆积的范围、深度和高度。
⑷海生物清理:清理附着在水下结构和牺牲阳极表面的海生物。
⑸防腐检测:测量水下结构和牺牲阳极的电位,经保护的钢结构点位必须低于−0.8V,评估防腐系统性能和保护效果;测量特定防腐涂层厚度。
⑹金属无损探伤:对水下结构损伤部位、连接点、管节点和焊缝进行无损探伤,确定缺陷开始位置、结束位置以及缺陷长度、深度。
⒉海底电缆检测需求
海底电缆常见问题包括海缆保护装置(海缆中心夹具、弯曲限制器)损坏失效;海缆受到海生物、潮汐、洋流和海事活动(锚害)的影响引发铠装层、绝缘层损坏以及过负荷引起的绝缘击穿导致海缆短路故障,影响系统的正常运行;海缆故障点的精确定位和查找困难等。针对上述问题,检测作业需求主要包括:
⑴裸露海缆检测:检查裸露海缆外观,是否存在悬挂、弯曲和破损等;测量裸露海缆的长度、弯曲半径等数据是否和设计一致。
⑵接入端海缆检测:检查接入端海缆保护装置完整性,有无破和缺失;测量海缆和喇叭口夹角、入泥夹角和裸露长度等是否和设计数据一致。
⑶掩埋海缆路由和埋深检测:测量掩埋海缆的绝对经纬度位置和深度,确定海缆的路由信息。
⑷海缆故障点定位:在海缆发生故障后,精确定位故障点经纬度位置和故障点损坏情况,为故障处理和修复提供关键数据。
三、ROV检测技术
ROV具备高效、大深度、长时间水下作业和自动化作业等优点,特别是能够搭载多种类型检测系统完成水下检测作业和故障点的定位,可使用的水下检测技术和搭载的检测设备主要可以分为以下几类。
⒈光学检测
光学检测主要是指通过水下摄像机获取高质量的水下目标图像,适用于水质条件较好的海域。光学摄像机的分辨率一般要求大于1080p,光照灵敏度大于0.001lux,视角可达到110°。水下摄像机一般安装在ROV上的独立外置云台和框架上,云台的俯仰控制一般可以达到±90°,有效扩展了观察范围。如果水深较深,能见度较低,则可以通过在云台和框架上可以补充安装多个照明灯提高可见度,单个照明灯光通量可达到8000lm。水下摄像机往往还设有激光标尺,可以在一定程度上对目标物长度进行测量,激光点间距应超过0.5m。
受到ROV自身运动保持能力和外部海流等因素的干扰,高分辨率水下摄像机必须靠近目标物才能获取较高质量的图像,因此ROV的抗流能力和运动控制的稳定性至关重要。在水质较为浑浊的海域,通过偏振光成像技术和软件的后处理可以在一定程度上实现目标图像增强。

⒉声学检测
声学是水下检测的常用检测技术之一,可供ROV搭载的主要设备包括多波束图像声呐和机械扫描声呐。
⑴多波束图像声呐
该类型声呐的成像原理是通过发射换能器发射声波,在一定空间内形成多个垂直航向分布的窄波束,记录回波获取多个波道信息,实时生成二维/三维图像数据。如TeledyneBlueViewM900图像声呐,其最大量程可达到100m,最优量程可在2m~60m,量程分辨率0.025m,图像更新率达到25Hz,视野区域达130°。3D图像声呐CodaEchoscope的量程范围为1m~120m,量程分辨率0.03m,图像更新率达到12Hz,视野角度50°×50°,可以从每次声波传输中生成一个由逾16000个探测点组成的完整三维模型。
多波束图像声呐一般和水下摄像机共同搭载在ROV前方的云台上,相对于可见光成像,图像声呐成像距离远,受水质和水下光线影响小等特点。如图3所示,ROV搭载图像声呐主要用于导航和目标识别、检测,同时具有面积测量、长度测量等功能。

⑵机械扫描声呐
机械扫描声呐一般包括单波束机械扫描声呐和3D机械扫描声呐单波束机械扫描声呐的成像原理是利用发射基阵向水中发射声脉冲,通过目标产生的脉冲回波对水下目标进行测距、定位以及识别。然后声呐探头以一定的角度步进旋转,再次重复发射和接收过程,旋转360度后形成一幅完整的二维海底图像。相对于多波束图像声呐,机械扫描声呐能够获得范围更大的、更精确的海底图像,其测量量程可达到0.5m~300m,距离分辨率可达到0.03m。如图5所示,通过ROV搭载MS1000单波束机械式扫描声呐在合适海底位置坐底并进行扫描,能够获得桩基础周围的二维精确图像数据,并可计算水下结构距离、海底冲坑的面积,裸露海缆的长度等关键数据。

3D机械扫描声呐,其测量原理是声呐头发射1个频率为脉冲信号形成1个的扇形扫描区域,系统接收到目标物反射的信号后,结合波束形成、波束指向、振幅及相位检测等技术生成1个2D图像(帧),再通云台在水平方向上360°旋转,实现检测目标物不同部位的位置信息,最终生成3D结构图像。
除了单角度扫描,还可使声呐依次向上或向下倾斜一定的角度之后再进行水平方向的旋转扫描。扫描的区域是一个球形,球形扫描比单角度扫描范围更广,且有部分扫描区域重叠。点云的密度更大,精度更高,但由于是多个倾斜角度依次扫描,扫描时间是单角度扫描的若干倍。3D机械扫描声呐Teledyne Blue View BV5000的测量范围可以达到1m~30m,最小的距离分辨率可以达到0.015m。如图6所示,使用ROV搭载BV5000在合适海底位置进行坐底后进行扫测,能够获得桩基础周围的三维精确点云数据,通过点云处理软件可计算水下结构距离、海底冲坑的面积,高度/深度、裸露海缆的长度和夹角等关键数据。

⒊电学检测
电学检测主要使用电位计测量水下结构和牺牲阳极的电位,以确认阴极保护的有效性。如可供ROV搭载的PolatrakCP探针量程为0至−1999mV,精度达到±5mV。
如图7所示,在测量电位前,应使用高压水枪或者空化射流喷头清理表面附着的海生物,再操作ROV使探针和金属结构表面进行持续的紧密接触测量。在实际测量过程中,被选择的阳极平均分布在导管架的不同侧面和不同水平层上,对外观检查到阳极耗蚀严重位置、或阳极不起作用位置应重点检查。
⒋磁学检测
磁学检测是目前应用广泛、切实有效的水下检测技术之一。针对水下结构金属无损检测和针对海底掩埋海底电缆的检测技术又有所区别,包括以下4类。
⑴金属结构ACFM技术
交流电磁场测量法(ACFM)的基本原理是交流电流在待测导电试件表面及附近产生感应电流,进而在试件表面产生感应磁场,通过对试件表面磁感磁场特征的测量,反演判断试件表面的裂纹信息。ACFM检测具有无需接触、可穿透涂层进行测量、可准确测量裂纹长度和深度、待测表面清洁度要求低、对材料性质变化不敏感、对探头的升降不敏感,检测效率高、测量要求相对简单等优点,因此也广泛应用在水下金属结构的无损探伤。
针对水下结构不同的检测部位,需要ROV通过配置的机械臂、探测小车等特殊结构搭载不同类型的检测探头。如图8所示,英国TSCAmigo2检测系统就具有标准焊缝探头、铅笔式探头、提方式阵列探头和扫查式阵列探头等多种专用探头和搭载装置。
⑵海缆绝对磁场测量技术
使用ROV搭载共振磁力仪、磁通门磁力仪以及磁梯度仪等传感器,测量海缆铠装层对地磁场的影响(磁异常),已知的磁场分布规律对比后可对海缆进行定位。但磁力仪易受到强磁噪声、载体推进器以及其他传感器噪声的干扰,同时在进行海缆的埋深反演时还需要考虑各种测量误差。
⑶海缆有源检测技术
有源检测技术主要通过ROV搭载的探测系统识别海缆正常运行期间的工频交流信号,以及在海缆故障期间注入的外加特定频率的交流信号,并进行分析处理,获得海缆和ROV的位置关系,结合ROV自身搭载的惯性导航、DVL多普勒计程仪和USBL超短基线的高精度融合定位数据,计算海缆精确位置和埋深数据。英国TSS350系统可探测周围10m范围左右的电缆信号,系统精度可达到0.1m,但如图10所示,由于各种噪声源的干扰以及电磁信号的衰减,ROV需要始终保持稳定运行在目标海缆左右有效测量距离内。
⑷脉冲感应技术
由于海底电缆包含加强钢丝和铠装层等金属材料,通过探测金属材料对外源电磁场的影响而实现对海缆的检测,无需向海缆注入额外信号。使用ROV搭载英国TSS440系统,系统包括3个线圈及高度计,在不接地回线中输入交变电流产生变化的磁场,海底电缆感应此磁场产生2次磁场,最终由接受线圈接受2次磁场所对应的感应电压,从而确定海缆和ROV的距离,配合高度计可探测埋深,但检测效果受检测目标的响应能力(即目标物体积)和周围的磁性物质影响较大。
四、结论
近年来,我国海上风电的快速发展,水下检测的需求不断增长,而随着海上风电向深远海发展,单纯依靠船载测量系统和潜水员作业已经无法满足未来的需求。ROV作为水下检测和作业系统的搭载平台,势必会在未来发挥更大的作用。本文对存在的问题和发展趋势进行了整理和分析。
⑴提高检测技术的准确度,采用多种类型检测相结合,精准评估水下资产的健康状态,保障海上风电的安全稳定运行水下环境复杂多变,同时面对各种严重的干扰。空气中有效的检测技术在水中或者无法应用,或者效果不佳。目前水下检测可采用水下光学、声学、电学、磁学等不同的检测手段具有不同的优势和局限性,一方面应当在检测技术上进行研究和探索,不断提高检测的准确度,另一方面要将各个孤立的检测系统的测量数据相融合,构建水下资产健康的评估模型,精确掌握设备状态,才能对海上风电的基建和生产运维起到帮助作用,促进海上风电的持续健康发展。
⑵针对我国海上风电的实际情况,开发适用于海上风电水下检测作业的专用ROV我国的海上风电的情况和国外海上风电、海洋石油行业均有所不同,目前我国海上风电项目已经实现平价上网,降低后续运维成本是降低海上风电成本的关键。因此,设备购置、使用和维护成本对ROV在海上风电的应用至关重要,海洋石油行业上广泛使用的进口大型作业级ROV在海上风电行业并不适用。此外,面对近海海况复杂、潮流影响大、作业窗口期短、检测作业项目多、专业运维船舶不足等问题,采用通用的ROV已经无法很好的满足需求,应针对性的开发适用近海高抗流、模块化设计、可供多种检测设备搭载的海上风电专业ROV。
⑶加快水下关键传感器、检测系统的国产替代进度,避免“卡脖子”目前用于海上风电检测的ROV基本上已经能实现国产化,但ROV搭载的关键传感器和检测系统基本由国外产品垄断。尽管有部分关键设备正在开展国产化工作,但实际效果和国外产品还有较大差距。虽然我国近年来在深海和军事领域的声呐等水下传感器取得了一定进步,但海上风电位于近海,检测目标距离近、测量精度要求高,两者的技术路线也存在较大差异。面对复杂的国际形势,各种关键设备不断面对禁运的威胁,所以不论是应用单位、生产厂商还是高校科研单位,应积极联合,共同加快海洋高端装备的国产替代进程。
⑷运用人工智能技术,提高ROV的智能化水平目前ROV基本具备了一定的自动化水平,但在进行水下检测作业时基本由操作人员在甲板上控制台遥控作业,操作人员容易受到天气、海浪等环境因素的影响,从而影响水下检测的效率和准确性。针对海上风电场通讯条件较好的情况,应利用海上风电场通讯条件较好,开发ROV远程监控系统,实现检测数据同步回传和专家远程诊断指导。随着人工智能和深度学习算法的不断发展,进一步开展基于深度学习的水下目标检测、识别和路径规划算法的研究和应用工作,从而实现自主化检测作业,降低对操作人员技术水平和身体状态的依赖程度。【作者简介】文/童博 刘溟江 姚中原 赵勇 胡皓 姚广钊,分别来自西安热工研究院有限公司、华能国际电力江苏能源开发有限公司清洁能源分公司、深之蓝海洋科技股份有限公司。第一作者童博,男,1983年出生,博士、高级工程师,研究方向为新能源电站智能化。本文受基金项目赞助,中国华能集团科技项目“海上风电智能监测与巡检技术研究及应用”(HNKJ20-H44)。
文章来自《船舶工程》(2023年增刊1),参考文章略,版权归出版单位与作者所有,由“溪流之海洋人生”微信公众平台编辑与整理,用于学习与交流。



